This page describes how time synchronization works.
The objective of time synchronization is to coordinate otherwise independent clocks. Even when initially set accurately, real clocks will differ after some amount of time due to clock drift, caused by clocks counting time at slightly different rates.
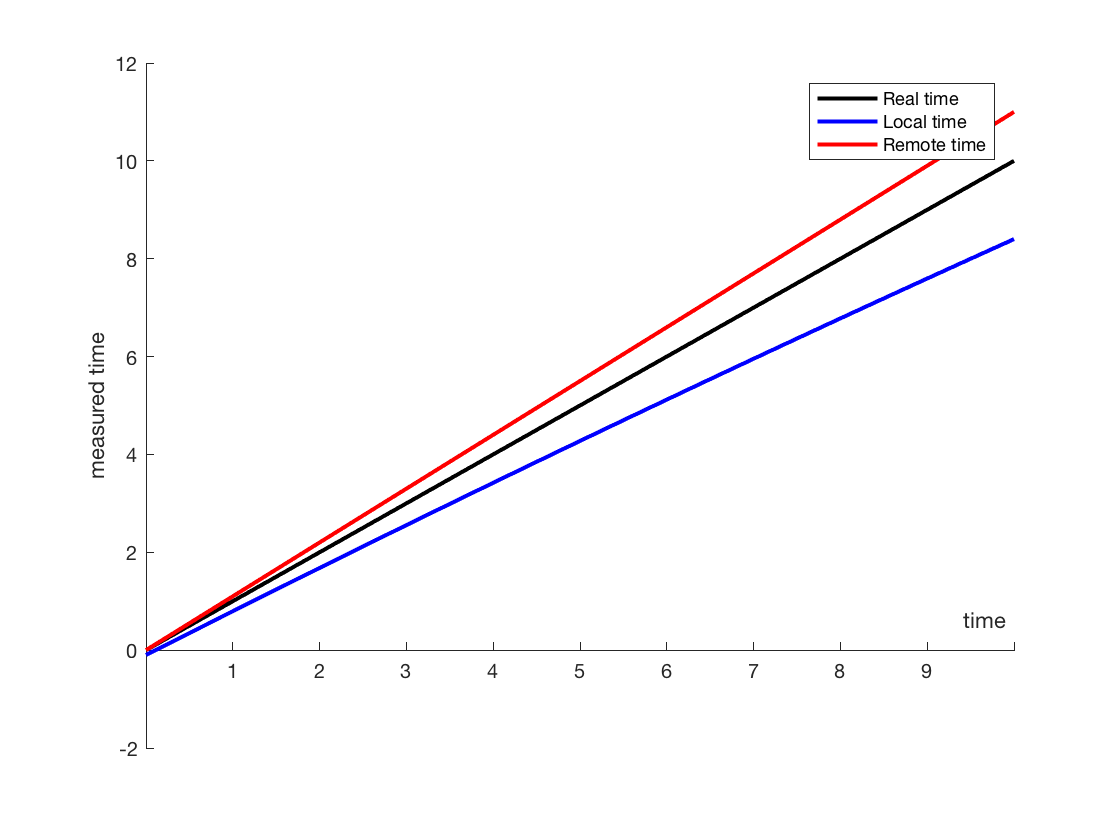
There is one master clock node, which usualy coincides with the resolver node, and every other node instance will try to synchronize its clock to the master clock, while maintaining a guarrantee on some properties:
- time must not do arbitrarily big jumps
- time must always increase monotonically, i.e. if we read time into variable T1, and after some time we read again time into variable T2, it must always be that T2 >= T1
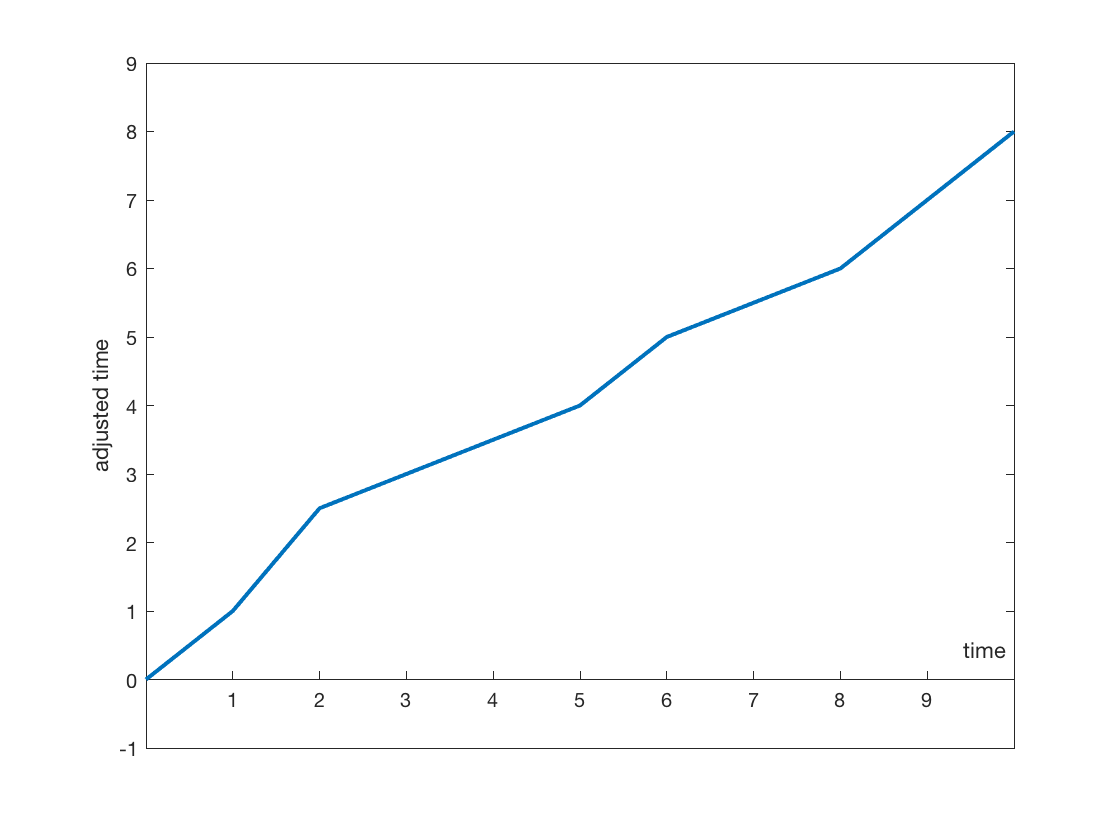
- locally, adjusted time must change at a constant speed, that is, the adjustment must happen at a constant rate
- the adjustment must be a continuous function of time, such that even if the time is adjusted at a low rate (typically 1Hz) we get a consistent behavior for sub-second reads
Time synchronization never changes the computer's hardware clock. It rather computes an offset to add to the hardware clock.
The method Node::timeUSec() returns the value of the hardware clock corrected by the required offset, while the method Node::hardwareTimeUSec() will return the hardware clock actual value.
Each time a new time is received from master clock (tipically in the heartbeat message) the method Node::updateTime() is called, and a new offset is computed.
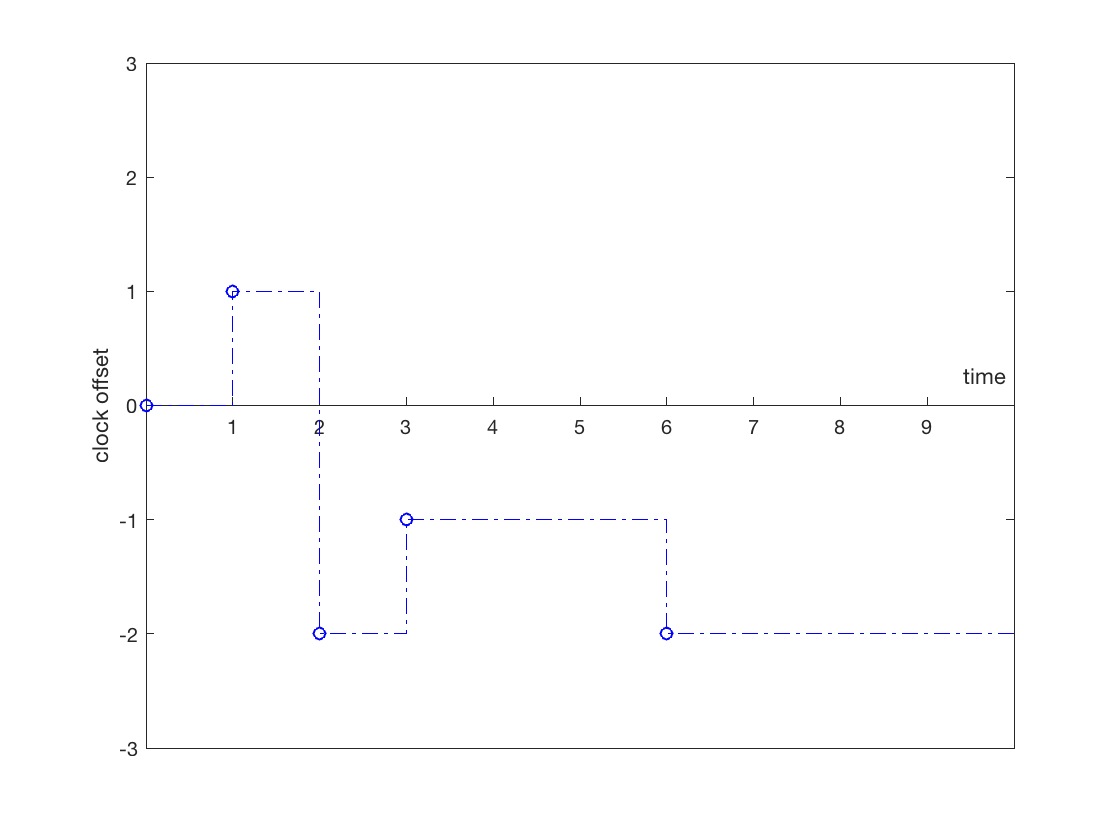
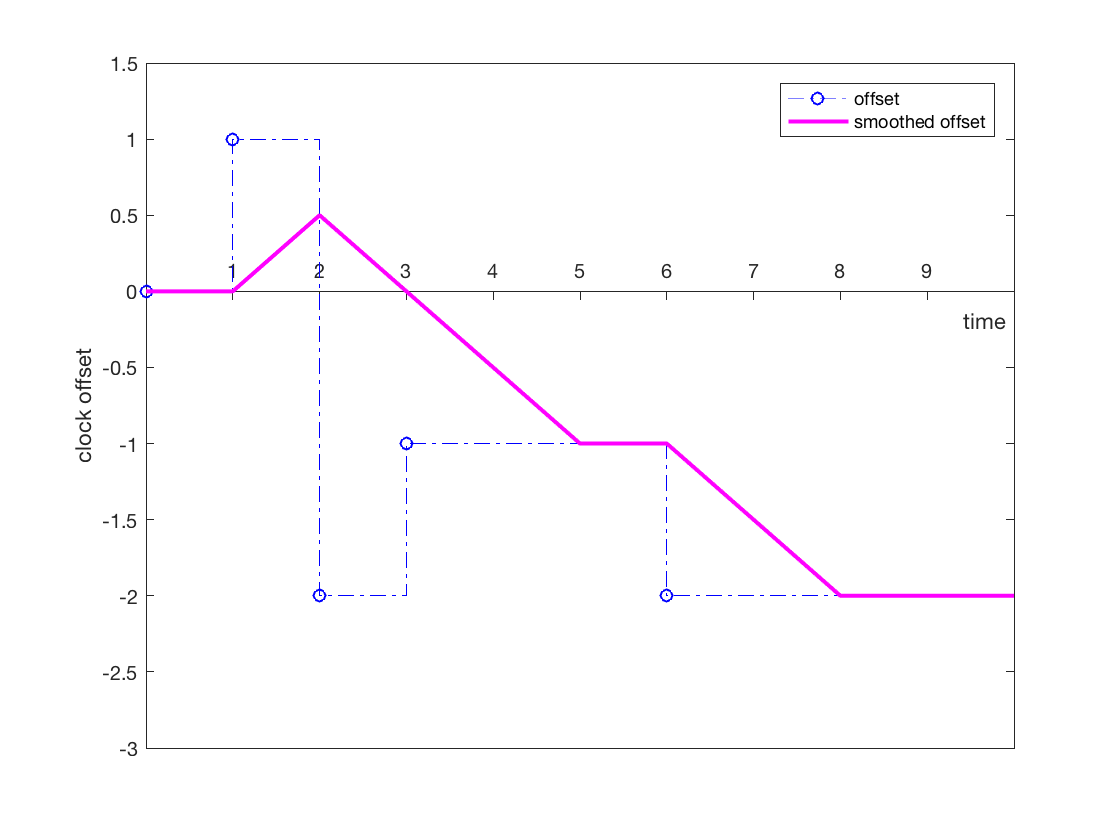
If we look at the offset as a function of time we see that is discontinuous. This is bad because just adding the offset to the hardware clock would cause arbitrarily big jumps and even jump backwards in time, thus violating the two properties stated before.
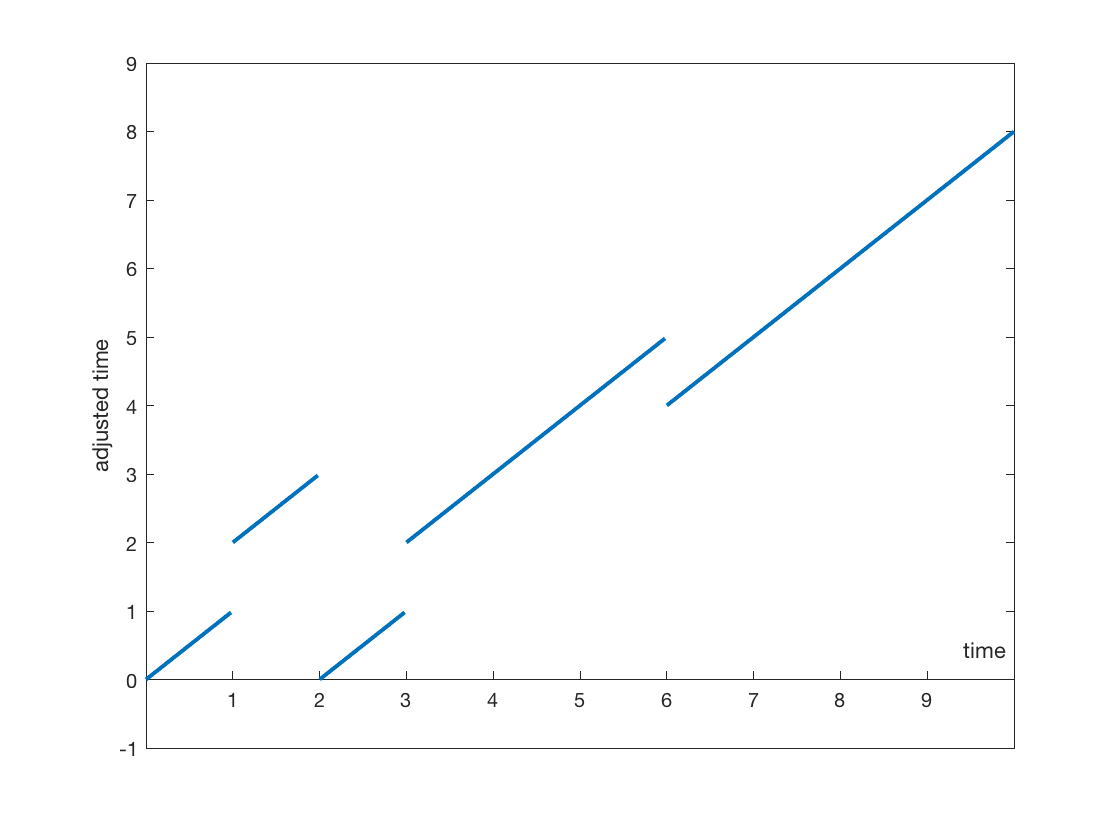
To fix this, the offset function is smoothed so that it is continuous, and limited in its rate of change (max slope). It is important that the max slope is always greater than zero, so as to produce an actual change, and strictly less than 1, so as to not cause time to stop or go backwards.